ポンプを止めても水がチョロチョロと出続けてしまうことに 悩まされていた現象 が、やっと解決しました。

逆止弁が一番高い位置になるように組み直し、吐水口の位置も少し高くしました。

また吐水口の直前までチューブの内径を 4mm から 8mm に変更してみました。
どの施策が奏功したのか分かりませんが、ポンプを止めるとピッタリ水が止まりました。難しかったですが、こういう課題を考えるのは楽しいですね。
ポンプを止めても水がチョロチョロと出続けてしまうことに 悩まされていた現象 が、やっと解決しました。
逆止弁が一番高い位置になるように組み直し、吐水口の位置も少し高くしました。
また吐水口の直前までチューブの内径を 4mm から 8mm に変更してみました。
どの施策が奏功したのか分かりませんが、ポンプを止めるとピッタリ水が止まりました。難しかったですが、こういう課題を考えるのは楽しいですね。
鉢植えのオリーブに自動的に水やりします。蛇口からの給水は、故障時に水が出たままになるのが心配なので、定期的にタンクに水を溜めてから、ポンプで水やりするシステムを製作しました。
貯水タンクにはカインズホームの 45リットルごみ箱 を選びました。水圧への耐力が不安でしたが、丸いごみ箱よりも四角い方が加工しやすいと考えました。
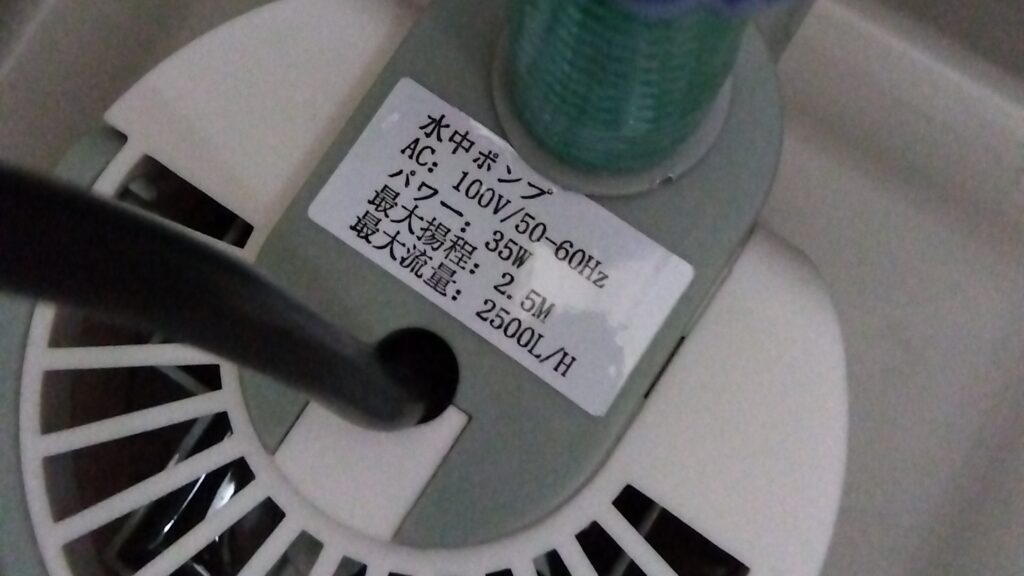
ポンプは比較的に安価な 水中ポンプ を購入しました。最大揚程 2.5m と表記がありますが、実際にはごみ箱の高さを越えるのが精一杯と、パワーは全く足りないので、まだ試験中です。
貯水タンクへの注水は フロートバルブ を付けました。水を止める仕組みは電気式より、このような機械式の方が安心です。
このような仕上がりになりました。手前から、タンクへの給水、ポンプからの排水、ポンプの電源の順です。排水の右側に飛び出ているのは、後述の サイフォン 防止用の逆止弁です。

外側から見ると、このような形です。

ごみ箱は中が見えません。光が入ると藻が生えてしまうので仕方がありませんが、これでは、タンクの水切れが分かりません。そこで、非接触の 液面センサー によりタンクの外側から監視して、水面が下がったら LINE 通知が来るようにしました。通知が来たらタンクに水を補充します。

肝心の水中ポンプの ON/OFF は スマートプラグ のタイマーを使いました。スマートフォンから灌水のスケジュールを変えられるので便利です。この商品は屋外で使えるのと Wi-Fi が切れても単体でスケジュール動作できるので選択しました。
逆止弁を用いてサイフォン現象に対策したつもりなのですが、逆止弁が働く圧力に達さないのか、ポンプを停止してもサイフォン現象が起きてしまうのが当面の課題です。しばらく試験的に運用して様子を見たいと思います。
植木への水やり自体はスマートプラグで別途タイマー制御して、貯水タンクからポンプで吸い上げるようにしています。しかし、このタンクが見えない場所にあるので、タンク自体の水が枯渇しそうな場合に、タンクへの水の補充を LINE 通知する機能が欲しくなりました。
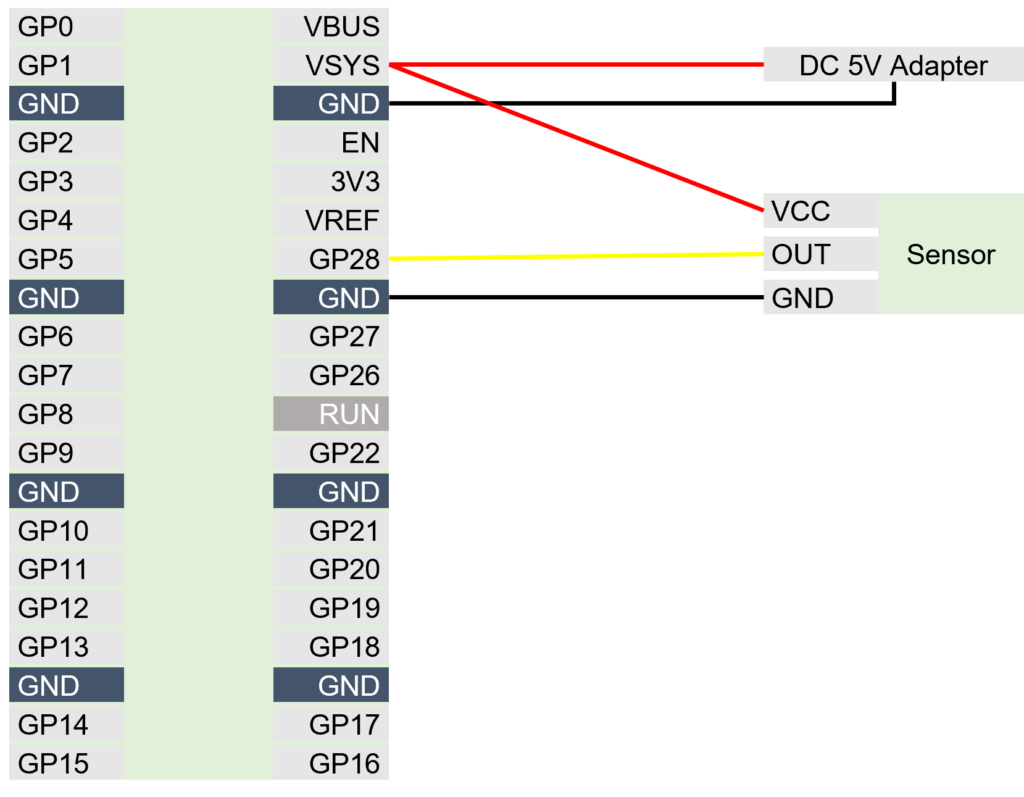
ちょうど良い製品が無かったので Pico 2 W で作成することにしました。はじめての Pico なので sozorablog さんにご教示いただきながら、試行錯誤で以下の配線にしました。
ご参考として main.py の Python コードも載せておきます。5 秒おきにセンサーの値を読み出して、変化があったら LINE Messaging API で通知しているだけです。2025/3/31 に LINE Notify API がサービス終了してしまったので Messaging API を使用します。
同じ通知でも対処せずに放置したら再送したい (水不足のメッセージが来ないから大丈夫と思っていたら監視システムが止まっていたとかは困るな) とか考えて、少し余計な制御を入れています。
消費電力の節約のため、メッセージ送信する時だけ WiFi に接続して、送信後は切断します。Deep Sleep が Pico 2 では、まだ使用できないようなので Deep Sleep 対応はファームウェアの更新を待ちたいと思います。
WiFi アクセスポイントが停止しているような場合は例外がスローされるので再試行されます。しかし、動作テスト中に ENOMEM (メモリ不足) の OS エラーが出ることがありました。このような場合は、再試行では回復できないケースが多いです。このため、例外を捕捉した回数を累積して、上限に到達したら Pico 自体を強制リセットするようにしています。
また、短時間で再試行が連続して Pico や WiFi アクセスポイントに過度な負担を掛けないように、例外発生時の待機時間は Exponential Backoff で 5 秒, 10 秒, 20 秒 … (最大で約 21 分) のように 2 倍ずつ延ばすようにしています。
尚、センサーの設置条件に依ると思いますが、水面がセンサーの高さとスレスレの場合や、水面が揺れると、短時間で連続して通知が来てしまうので、HISTORY_LENGTH で指定した回数だけ同じ結果が連続で得られた場合だけ、安定したセンサーの結果として採用するようにしています。
import machine
import network
import ujson
import urequests
import utime
import config
# Seconds in a day
SECONDS_IN_A_DAY = 60 * 60 * 24
# Detect interval (sec)
INTERVAL_SEC = 5
# Number of times to check if the same result is obtained consecutively
HISTORY_LENGTH = 5
# Number of times an exception occurs before reset
MAX_EXCEPTIONS = 9
# Embeded LED
led = machine.Pin("LED", machine.Pin.OUT)
# Wireless LAN
wlan = network.WLAN(network.STA_IF)
# Liquid level sensor
sensor = machine.Pin(28, machine.Pin.IN, machine.Pin.PULL_UP)
def console_print(text):
"""Print to console.
Args:
text (str): message.
"""
print(f"{utime.time()}: {text}")
def connect_wifi():
"""Connect to wifi network.
Raises:
RuntimeError: Network connect failure.
"""
if wlan.status() == 3:
return
console_print("Connecting ...")
led.on()
wlan.active(True)
wlan.connect(config.WLAN_SSID, config.WLAN_PASSWORD)
count = 30
while 0 < count:
led.toggle()
if wlan.status() < 0 or 3 <= wlan.status():
led.off()
wlan_status = wlan.ifconfig()
console_print(f"Connected {wlan_status[0]}.")
return
count -= 1
utime.sleep(0.5)
led.off()
raise RuntimeError("Connect failed.")
def disconnect_wifi():
"""Disconnect from wifi network."""
wlan.disconnect()
wlan.active(False)
console_print("Disconnected.")
def send_message(message):
"""Send message using LINE Messaging API
Args:
message (str): message
"""
connect_wifi()
console_print(message)
response = urequests.post(
config.CHANNEL_ENDPOINT_URL,
headers={
"Content-Type": "application/json",
"Authorization": f"Bearer {config.CHANNEL_ACCESS_TOKEN}",
},
data=ujson.dumps(
{
"to": config.CHANNEL_USER_ID,
"messages": [{"type": "text", "text": message}],
}
).encode("utf-8"),
)
response.close()
disconnect_wifi
def get_liquid_level():
"""Detect liquid level
Returns:
bool: Liquid detect status
"""
return sensor.value() == 0
# Initialize
led.off()
results = []
last_message = (None, 0)
exceptions = 0
# Loop
while True:
try:
# Get current result
current_result = get_liquid_level()
led.value(current_result)
# Update results
results.append(current_result)
results = results[-HISTORY_LENGTH:]
# Check continuity
if len(set(results)) == 1:
# Select message
if current_result:
message = (
"タンクは水が入っています",
utime.time() + 7 * SECONDS_IN_A_DAY,
)
else:
message = (
"タンクの水が不足しています!!",
utime.time() + 1 * SECONDS_IN_A_DAY,
)
# Send message
if last_message[0] != message[0] or last_message[1] < utime.time():
send_message(message[0])
last_message = message
# Continue
exceptions = 0
utime.sleep(INTERVAL_SEC)
except KeyboardInterrupt:
# Break
break
except Exception as e:
# Error
console_print(e)
# Check force reset
exceptions += 1
if MAX_EXCEPTIONS < exceptions:
console_print("Reset.")
machine.reset()
# Continue
retry_factor = 2 ** min(exceptions - 1, 8)
retry_duration = INTERVAL_SEC * retry_factor
console_print(f"Continue after {retry_duration} seconds.")
utime.sleep(retry_duration)
# Break
console_print("Break.")別途 config.py というファイルに、以下のように環境固有の情報を定義して main.py と並べて Pico に保存します。
WLAN_SSID = "WiFi の SSID"
WLAN_PASSWORD = "WiFi のパスワード"
CHANNEL_ENDPOINT_URL = "https://api.line.me/v2/bot/message/push"
CHANNEL_ACCESS_TOKEN = "自分のチャネルアクセストークン"
CHANNEL_USER_ID = "自分の LINE のユーザ ID"Pico 面白い。
ラズパイピコ2で久しぶりの電子工作を楽しみ中です。ハンダごてを持ったのは何年ぶりだろう。
折角、薄くて小さいピコなので、悩ましいのはケースです。ダイソーでこのケースを発見して即購入しました。旅行グッズのコーナーにありました。2個入りで100円です。

USB コネクタがケースに収まらないので Micro USB からは給電出来ませんが、もともと 5V の AC アダプタを使用する計画だったのでシンデレラフィットです。


ケースに穴を開けてケーブルを通す必要がありますが、良い感じです。結束バンドでケーブルの引っ張り力が端子に掛からないようにしました。

ケースのヒンジの方に USB コネクタを向けてしまいました。この向きだと、USB コネクタにケーブルを挿すときは、蓋を外さないといけません。反対に入れていたら蓋を開けた隙間から USB 接続できたのに。

私はケーブルをハンダ付けした後にボードの向きの失敗に気付いたので諦めました。メンテナンス時は蓋を外す事にします。同じケースを使う方はお気を付けください。
Amazon で買った非接触の液面センサーが明日届くはずなので楽しみです。